I finally put together a Pitot testing rig for my truck. Its purpose is to quantify the amount of temperature drop at the tube, due to airflow.
 |
| Moving testing rig |
 |
| Rigs detaches quickly from power supply as well as from the armrest |
 |
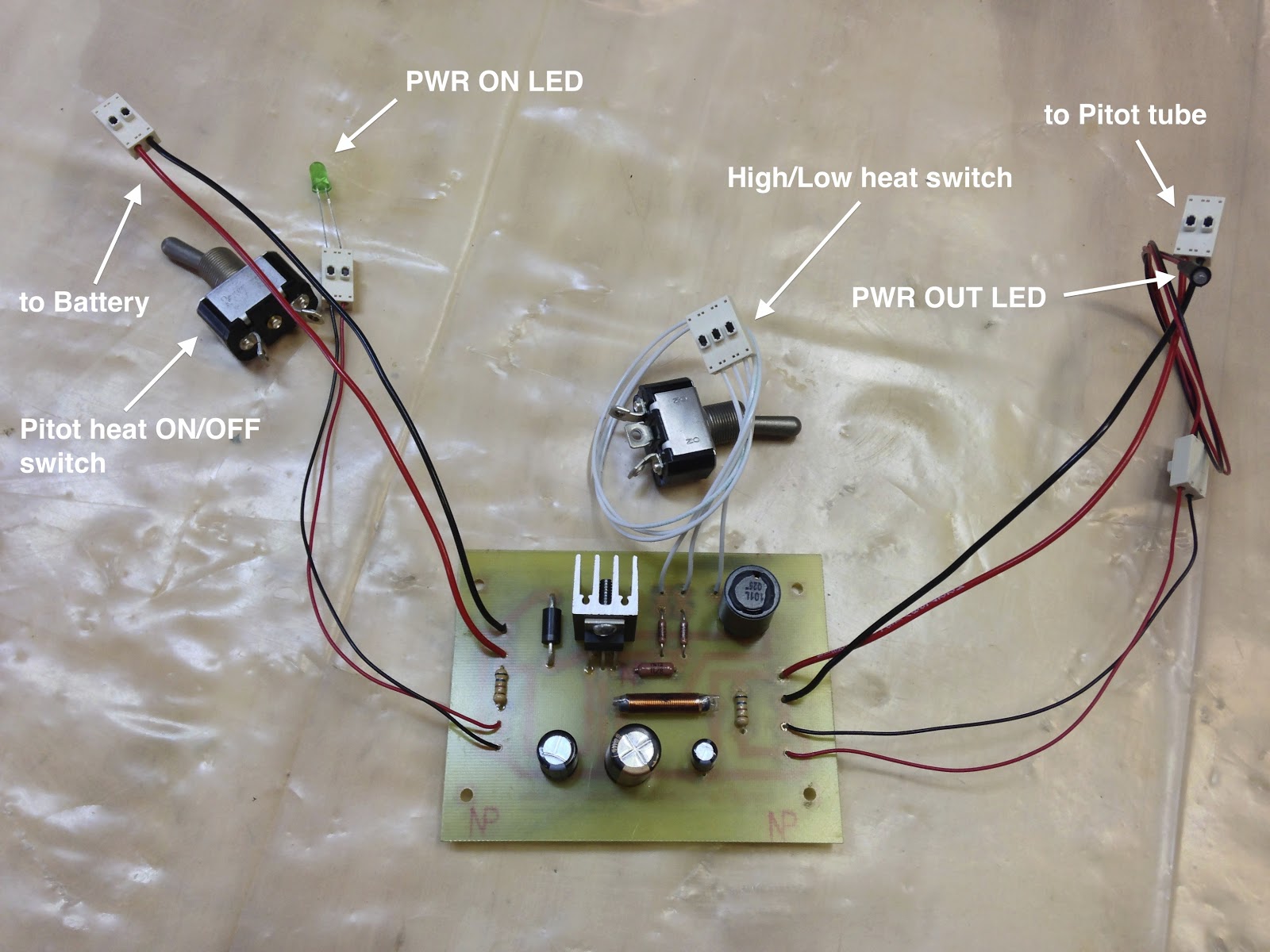
| Control panel |
Unfortunately the live testing session had to be postponed. The main cause was a lack of volunteers willing to drive me at highway speeds for an hour or two, windows down, at sub-freezing temperatures, while I performed a few tests.
I just can’t understand people sometimes!
Bringing the car rig back indoor, I setup the first tests to gather two sets of data for the static condition, low heat (ground mode), and high heat (flight mode). These temperatures would be used as reference for the dynamic data, whenever I’d be able to collect it.
Because of the shortage of volunteers related to the weather, I was forced to come up with less refined testing methodology to get some dynamic data to work with. I decided to put the air compressor to good use by blowing air at 30 psi over the hot Pitot tube, and measure the induced temperature drop.
Sadly, one of the drawbacks of polishing the Pitot tube to such a glossy mirror finish, is that my IR thermometer refused to work with it, and I had to go back to using the AC pocket thermometer, whose upper limit reaches only the low 200s (℉).
 |
| Simulating inflight airflow cooling action |
My Voltage Regulator design has two settings, one is low heat (low voltage), the other is high heat (high voltage).
Here's my reasoning behind the 2 settings...
When the pilot turns on the Pitot heat on the ground, the low heat circuit is activated. This setting warms up the Pitot tube verifying the system is functional, and the low heat won't damage the foam in the nose structure, even without airflow.
During the takeoff roll, an airspeed switch (or EFIS command) would activate the high heat circuit, providing enough "juice" to keep ice from forming on the probe. The pilot would not have to remember to turn it on, because it would be automatic. A green LED for ground mode would turn blue for inflight mode, as status confirmation.
Back on the ground, the pitot heat would revert again to ground mode automatically during the landing roll, preventing damage to the nose structure should the pilot get distracted and forget to turn the system off.
In ground mode, coming accidentally in contact with the probe would not create a burn hazard, due to the mild temperature involved (around 120℉).
Back to the tests, here are the 3 data sets I recorded combined into one graph.
 |
| High heat, low heat, high heat and airflow versus time |
Now, let’s try to make some sense of it!
 |
| I'm satisfied with this curve |
It would appear that the ground-mode does a good job of preheating the tube, without making things so hot that someone could get burned, should he/she get in contact with it. It is a very shiny object after all!
In the retractable version the pilot would want to retract it soon after shutdown, so the potential for leaving some skin on it is there.
 |
| I'm not very excited by this curve |
The air-switch activated inflight-mode seems to have a good max value, but is a bit slow at ramping up the temperature.
The real problem in this instance could be when encountering icing conditions right after takeoff, with a Pitot heat that might not be spooled up yet, and the added airflow-induced temperature drop would just compound this issue.
Ideally, I'd like to see it reach max temp as fast as possible, then stay there indefinitely.
To do that, the Pitot needs as much power as possible right at takeoff, when it is still relatively cool, and has a harder time getting warmer because of the airflow.
Ideally, I'd like to see it reach max temp as fast as possible, then stay there indefinitely.
To do that, the Pitot needs as much power as possible right at takeoff, when it is still relatively cool, and has a harder time getting warmer because of the airflow.
 |
| Ideal Pitot heat spool up |
I smell a potential issue here, but let's add some airflow and see how that affects the maximum temperature reading.
 |
| Heat loss due to airflow |
Looking at how much, and how quickly, the core high temperature drops with airflow (orange line), it seems that it would probably take a long time once airborne for the Pitot to even reach the 110 degrees plateau, if ever!
My guess on this drop was around 50℉, I certainly was not expecting nearly 130℉!
I could probably get a little more power out of this voltage regulator, but that would also raise the max temperature. Given the amount of temperature drop caused by the air movement though, I feel that there is some room to expand upward without bumping into the foam heat-limitations (around 170ºF).
A more targeted way to steepen the initial heat ramp without having max temperature issues, could be using a control resistor that can change its value based on temperature. A properly sized Negative Temperature Coefficient (NTC) Thermistor could be buried (for lack of a better term) into the Pitot tube, and from its vantage point it would be exposed to the same temperature changes as the inner tube.
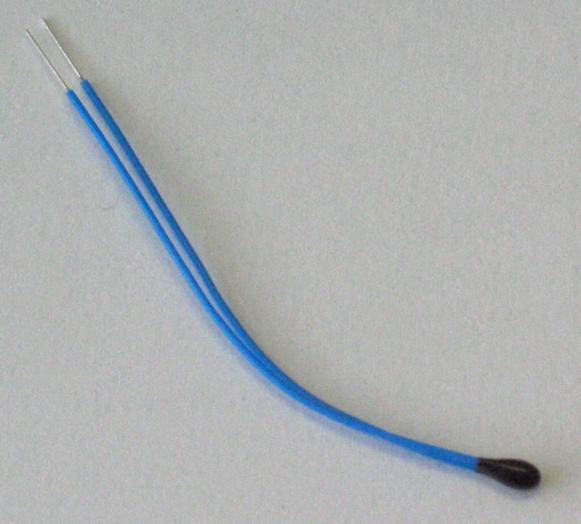 |
| One kind of Thermistor |
Inflight, with the tube temperature decreasing due to the increasing air flow, the NTC Thermistor would increase its internal resistance. Utilizing another set of wires pulled through the back of the retractable Pitot (or the side of the fixed one), the thermistor could control the output voltage of the Voltage Regulator, increasing the voltage when the temperature goes down, and reducing the voltage as a high temperature is reached.
In a system of this kind, you would see a high initial amperage draw, I'm thinking around 5 amps with this circuit, with a time to max temperature in the order of 2 to 3 minutes, then a gradual current reduction to very low values as the target temperature is achieved. Heat would be produced on-demand as conditions change, so you would expect a fluctuation of this current draw over time, corresponding to the changing OATs.
I’ll be testing the thermistor based circuit board soon, but it is very possible that a more powerful circuit might be necessary.
Anyway, it seems that more R&D (i.e. time & money) might be necessary once again, and my shaky machining skills could finally get pushed to the breaking point.






































{kind=link}